Univerzálny polohovací systém s piatimi stupňami voľnosti

|
Trenčianska Univerzita Alexandra Dubčeka v Trenčíne
Fakulta Mechatroniky |

|
Univerzálny polohovací systém s piatimi stupňami voľnosti Diplomová práca |
| Autor: | Bc. Branislav Medveď |
| Pedagogický vedúci: |
Ing. Branislav Anwarzai |
| Študijný odbor: | Mechatronika
|
| Akademický rok |
2009/2010
|
| Abstrakt
Cieľom diplomovej práce je skonštruovať laboratórny manipulátor pre podporu merania fyzikálnych polí. Úvodná časť pojednáva o bežných kinematických štruktúrach priemyselných robotov a ich najčastejších aplikáciách. Práca sa zaoberá návrhom manipulátora s piatimi osami a s kinematickou štruktúrou typu TTTRR. Pre pohony manipulátora sú zvolené krokové motory a riadenie v otvorenej regulačnej slučke. Na posuvné osi sú využité lineárne vedenia s guľôčkovou skrutkou. Jedna z rotačných osí využíva planétovú prevodovku. Pre kontrolu pohonov sú vytvorené matematické modely s pohybovou rovnicou, čo umožňuje simuláciu na úrovni jednej osi. Pre účely vyššieho riadenia je v kapitole Matematický popis riešenie priamej a inverznej kinematickej úlohy. Práca sa ďalej zaoberá možnosťami automatizovaného a ručného riadenia. Na ručné riadenie je navrhnuté rozhranie manipulátora pre komunikáciu s PC po zbernici USB a programové vybavenie. Záver práce ukončujú kapitoly o návrhoch efektorov pre upínanie vzoriek a určenie neistôt pri polohovaní. |
| Abstract
The aim of diploma thesis is to design laboratory manipulator for physical fields’ measurements support. Introduction chapter deals with ordinary types of kinematics structures and theirs mainly applications. The main part of thesis involves with manipulator design with five axes and TTTRR kinematics structure. Stepper motors have been chosen to drive axes with open loop regulation control. In translation axes there are used linear modules with ballscrews. One of rotation axes uses planetary low back-lash gearbox. There are also checks of axis drives with motion equations which enable simulations per one axis. For purposes intermediate control there are solutions of direct and inverse kinematics. Thesis deals with scope of manual and automatic control. For manual control there was developed manipulator interface with PC communication ability through Universal Serial Bus and communication software. Bottom of thesis is ended with chapters about effector’s designs and positioning uncertainty. |
Autor udeľuje nadobúdateľovi licenciu v tomto rozsahu:
- sprístupňovanie len anotácie a abstraktov záverečnej práce, kontaktov, ak autor alebo školiteľ nesúhlasia so zverejnením celého textu.
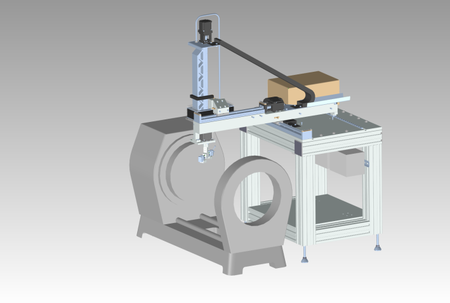
5 osí manipulátor
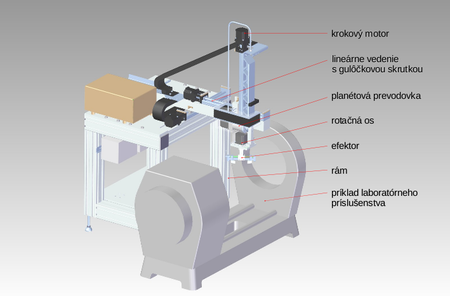
základné komponenty manipulátora
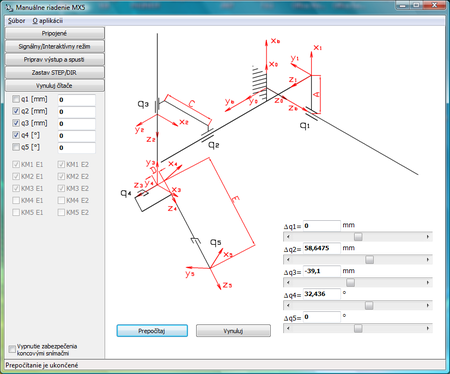
ovládací software - interaktívny režim
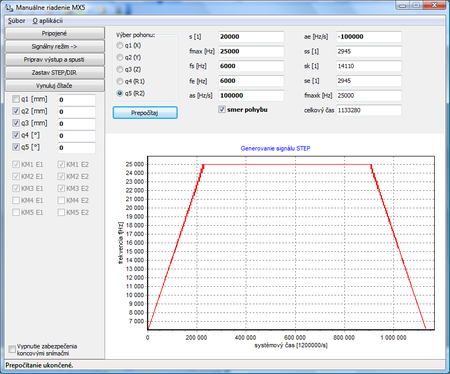
ovládací software - ladenie konštánt pohybu



